Wave Equation#
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import HTML
from matplotlib.animation import FuncAnimation
The wave equation is given by
Initial and Boundary Conditions#
The wave equation is second order with respect to time \(t\) therefore we need two initial conditions to specifiy a unique solution. The initial conditions are functions \(f(x)\) and \(g(x)\) which determine the solution and derivative at time \(t=0\):
Dirichlet boundary conditions specify the values of the solution at the endpoints:
Neumann boundary conditions specify the values of the derivative of the solution at the endpoints:
When one endpoint is a Dirichlet boundary condition and the other is a Neumann boundary condition then we call them mixed boundary conditions. For example:
Discretization#
Choose the number of steps \(N\) in the \(x\) direction and the number of steps \(K\) in the \(t\) direction. These choices determine the step sizes \(\Delta x\) and \(\Delta t\), and create a grid of points:
Here we have chosen some final time value \(t_f\) so that the domain of the solution \(u(x,t)\) is a finite rectangle \([0,L] \times [0,t_f]\). The goal of a finite difference method is to compute the matrix
which gives approximations of the solution \(u(x,t)\) at the grid points:
where \(x_0 = 0\), \(x_N = L\), \(t_0 = 0\) and \(t_K = t_f\).
Central Time Central Space#
Apply the central difference formula for \(u_{tt}\) at position \(x_n\) and time \(t_k\)
Apply the central difference formula for \(u_{xx}\) at position \(x_n\) and time \(t_k\)
Plug the formulas into the wave equation at position \(x_n\) and time \(t_k\)
Rearrange to solve for \(u_{n,k+1}\)
This is the central-time-central-space (CTCS) finite difference method for the wave equation.
CTCS with Dirichlet BCs#
Matrix Equations#
Consider Dirichlet boundary conditions \(u(0,t) = A_0\) and \(u(L,t) = A_L\). Write out the CTCS equations:
Note that we are writing the boundary conditions in a particular way:
so that the full vector of values at time index \(k-1\) appear in the last column.
These finite difference equations show us that approximations at time \(t_{k+1}\) are given by matrix multiplication of the vector of approximations at time \(t_k\) along with the vector at time \(t_{k-1}\). Therefore we can write the CTCS method as an iterative matrix formula
where
The finite difference formula at \(k=0\) yields
with the “ghost value” \(u_{n,-1}\). Use the initial condition \(u_t(x,0) = g(x)\) with the central difference formula
Rearrange for \(u_{n,-1}\)
Substitute into the formula at \(k=0\)
and rearrange to get
Write as a matrix equation
Here we are assuming \(g(0)=g(L)=0\).
Implementation#
The function waveCTCSD takes input parameters c, L, f, g, A0, AL, tf, N and K, and returns the matrix U of approximations where:
cis the diffusion coefficient in the wavve equation \(u_{tt} = c^2 u_{xx}\)Lis the length of the interval \(0 \leq x \leq L\)fis a Python function which represents the initial condition \(u(x,0) = f(x)\)gis a Python function which represents the initial condition \(u_t(x,0) = g(x)\)A0is the boundary condition \(u(0,t) = A_0\)ALis the boundary condition \(u(L,t) = A_L\)tfis the length of the interval \(0 \leq t \leq t_f\)Nis the number of steps in the \(x\)-direction of the discretizationKis the number of steps in the \(t\)-direction of the discretizationUis the matrix \(U = [u_{n,k}]\) of size \((N+1) \times (K+1)\) of approximations \(u_{n,k} \approx u(x_n,t_k)\)
def waveCTCSD(c,L,f,g,A0,AL,tf,N,K):
dx = L/N
dt = tf/K
r = c*dt/dx
x = np.linspace(0,L,N+1)
U = np.zeros((N+1,K+1))
U[:,0] = f(x)
U[0,:] = A0
U[N,:] = AL
A = np.zeros((N+1,N+1))
A[0,0] = 2.
A[N,N] = 2.
for n in range(1,N):
A[n,n-1] = r**2
A[n,n] = 2*(1 - r**2)
A[n,n+1] = r**2
G = g(x)
G[0] = 0.
G[N] = 0.
U[:,1] = 1/2*A@U[:,0] + dt*G
for k in range(1,K):
U[:,k+1] = A@U[:,k] - U[:,k-1]
return U
Example with Animation#
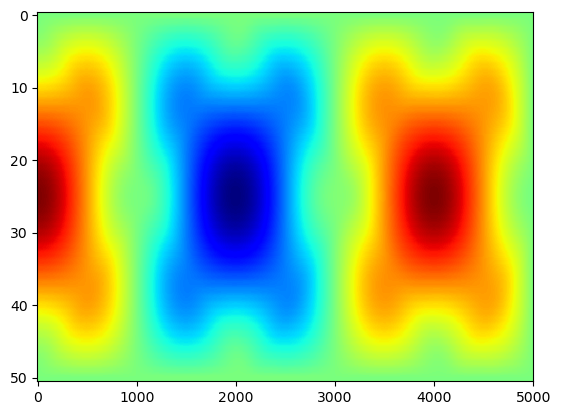
Consider the equation \(u_{tt} = 0.25 u_{xx}\) for \(L=1\) with initial conditions \(u(x,0) = 1 - \cos(2 \pi x)\), \(u_t(x,0) = 0\) and dirichlet boundary conditions \(u(0,t) = u(L,t) = 0\).
c = 0.5
L = 1
f = lambda x: 1 - np.cos(2*np.pi*x)
g = lambda x: 0*x
A0 = 0
AL = 0
tf = 5
N = 50
K = 5000
U = waveCTCSD(c,L,f,g,A0,AL,tf,N,K)
Visualize the result as a heat map:
plt.imshow(U,aspect='auto',cmap='jet')
plt.show()
Animiate the result:
nframes = 100
tstep = K//nframes
x = np.linspace(0,L,N+1)
fig,ax = plt.subplots()
line, = plt.plot([],[])
ax.set_xlim(-0.1,L+0.1)
ax.set_ylim(-2.2,2.2)
ax.grid(True)
update = lambda k: line.set_data(x,U[:,k*tstep])
ani = FuncAnimation(fig,update,frames=nframes,interval=1000*tf/nframes)
plt.close()
HTML(ani.to_html5_video())
CTCS with Neumann BCs#
Matrix Equations#
Consider Neumann boundary conditions \(u_x(0,t) = Q_0\) and \(u_x(L,t) = Q_L\). The CTCS finite difference equation at \(n=0\) yields
with the “ghost value” \(u_{-1,k}\). Use the central difference formula for \(u_x(0,t_k) = Q_0\)
Rearrange for \(u_{-1,k}\)
and substitute into the CTCS equation
Similarly, the boundary condition \(u_x(L,t) = Q_L\) yields the equation
Therefore we can write the CTCS method as an iterative matrix formula
where
For \(0<n<N\), the equation for \(k=0\) is just as for Dirichlet boundary conditions
For \(n=0\) we have
and for \(n=N\) we have
Therefore
Implementation#
The function waveCTCSN takes input parameters c, L, f, g, Q0, QL, tf, N and K, and returns the matrix U of approximations where:
cis the diffusion coefficient in the wave equation \(u_{tt} = c^2 u_{xx}\)Lis the length of the interval \(0 \leq x \leq L\)fis a Python function which represents the initial condition \(u(x,0) = f(x)\)gis a Python function which represents the initial condition \(u_t(x,0) = g(x)\)Q0is the boundary condition \(u_x(0,t) = Q_0\)QLis the boundary condition \(u_x(L,t) = Q_L\)tfis the length of the interval \(0 \leq t \leq t_f\)Nis the number of steps in the \(x\)-direction of the discretizationKis the number of steps in the \(t\)-direction of the discretizationUis the matrix \(U = [u_{n,k}]\) of size \((N+1) \times (K+1)\) of approximations \(u_{n,k} \approx u(x_n,t_k)\)
def waveCTCSN(c,L,f,g,A0,AL,tf,N,K):
dx = L/N
dt = tf/K
r = c*dt/dx
x = np.linspace(0,L,N+1)
U = np.zeros((N+1,K+1))
U[:,0] = f(x)
A = np.zeros((N+1,N+1))
A[0,0] = 2*(1 - r**2)
A[0,1] = 2*r**2
A[N,N] = 2*(1 - r**2)
A[N,N-1] = 2*r**2
for n in range(1,N):
A[n,n-1] = r**2
A[n,n] = 2*(1 - r**2)
A[n,n+1] = r**2
q = np.zeros(N+1)
q[0] = -2*r**2*dx*Q0
q[N] = 2*r**2*dx*QL
U[:,1] = 1/2*A@U[:,0] + 1/2*q + dx*g(x)
for k in range(1,K):
U[:,k+1] = A@U[:,k] - U[:,k-1] + q
return U
c = 0.5
L = 1
f = lambda x: 1 - np.cos(2*np.pi*x)
g = lambda x: 0*x
Q0 = 0
QL = 0
tf = 5
N = 50
K = 5000
U = waveCTCSN(c,L,f,g,Q0,QL,tf,N,K)
nframes = 100
tstep = K//nframes
x = np.linspace(0,L,N+1)
fig,ax = plt.subplots()
line, = plt.plot([],[])
ax.set_xlim(-0.1,L+0.1)
ax.set_ylim(-0.2,2.2)
ax.grid(True)
update = lambda k: line.set_data(x,U[:,k*tstep])
ani = FuncAnimation(fig,update,frames=nframes,interval=1000*tf/nframes)
plt.close()
HTML(ani.to_html5_video())
CTCS with Mixed BCs#
Combine both functions waveCTCSD and waveCTCSN into a single function wave which takes input parameters c, L, f, g, BCtype0, BC0, BCtypeL, BCL, tf, N and K, and returns the matrix U of approximations where:
cis the coefficient in the wave equation \(u_{tt} = c^2 u_{xx}\)Lis the length of the interval \(0 \leq x \leq L\)fis a Python function which represents the initial condition \(u(x,0) = f(x)\)gis a Python function which represents the initial condition \(u_t(x,0) = g(x)\)BCtype0is the type of boundary condition at \(x=0\) ('D'for Dirichlet or'N'for Neumann)BC0is the value of the boundary condition at \(x=0\)BCtypeLis the type of boundary condition at \(x=L\) ('D'for Dirichlet or'N'for Neumann)BCLis the value of the boundary condition at \(x=L\)tfis the length of the interval \(0 \leq t \leq t_f\)Nis the number of steps in the \(x\)-direction of the discretizationKis the number of steps in the \(t\)-direction of the discretizationUis the matrix \(U = [u_{n,k}]\) of size \((N+1) \times (K+1)\) of approximations \(u_{n,k} \approx u(x_n,t_k)\)
def wave(c,L,f,g,BCtype0,BC0,BCtypeL,BCL,tf,N,K):
dx = L/N
dt = tf/K
r = c*dt/dx
x = np.linspace(0,L,N+1)
U = np.zeros((N+1,K+1))
U[:,0] = f(x)
A = np.zeros((N+1,N+1))
q = np.zeros(N+1)
G = g(x)
if (BCtype0 not in ['D','N']) or (BCtypeL not in ['D','N']):
raise Exception("Expecting boundary conditions of type 'D' or 'N'.")
if BCtype0 == 'D':
U[0,0] = BC0
A[0,0] = 2.
G[0] = 0.
if BCtype0 == 'N':
A[0,0] = 2*(1 - r**2)
A[0,1] = 2*r**2
q[0] = -2*r**2*dx*BC0
if BCtypeL == 'D':
U[N,0] = BCL
A[N,N] = 2.
G[N] = 0.
if BCtypeL == 'N':
A[N,N] = 2*(1 - r**2)
A[N,N-1] = 2*r**2
q[N] = 2*r**2*dx*BCL
for n in range(1,N):
A[n,n-1] = r**2
A[n,n] = 2*(1 - r**2)
A[n,n+1] = r**2
U[:,1] = 1/2*A@U[:,0] + 1/2*q + dx*G
for k in range(1,K):
U[:,k+1] = A@U[:,k] - U[:,k-1] + q
return U
c = 0.5
L = 1
f = lambda x: 1 - np.cos(2*np.pi*x)
g = lambda x: 0*x
A0 = 0
AL = 0
tf = 5
N = 50
K = 5000
U = wave(c,L,f,g,'D',A0,'D',AL,tf,N,K)
nframes = 100
tstep = K//nframes
x = np.linspace(0,L,N+1)
fig,ax = plt.subplots()
line, = plt.plot([],[])
ax.set_xlim(-0.1,L+0.1)
ax.set_ylim(-2.2,2.2)
ax.grid(True)
update = lambda k: line.set_data(x,U[:,k*tstep])
ani = FuncAnimation(fig,update,frames=nframes,interval=1000*tf/nframes)
plt.close()
HTML(ani.to_html5_video())
c = 0.5
L = 1
f = lambda x: 1 - np.cos(2*np.pi*x)
g = lambda x: 0*x
Q0 = 0
QL = 0
tf = 5
N = 50
K = 5000
U = wave(c,L,f,g,'N',Q0,'N',QL,tf,N,K)
nframes = 100
tstep = K//nframes
x = np.linspace(0,L,N+1)
fig,ax = plt.subplots()
line, = plt.plot([],[])
ax.set_xlim(-0.1,L+0.1)
ax.set_ylim(-0.2,2.2)
ax.grid(True)
update = lambda k: line.set_data(x,U[:,k*tstep])
ani = FuncAnimation(fig,update,frames=nframes,interval=1000*tf/nframes)
plt.close()
HTML(ani.to_html5_video())
c = 0.5
L = 1
f = lambda x: 1 - np.cos(2*np.pi*x)
g = lambda x: 0*x
A0 = 0
QL = 0
tf = 10
N = 50
K = 5000
U = wave(c,L,f,g,'D',A0,'N',QL,tf,N,K)
nframes = 200
tstep = K//nframes
x = np.linspace(0,L,N+1)
fig,ax = plt.subplots()
line, = plt.plot([],[])
ax.set_xlim(-0.1,L+0.1)
ax.set_ylim(-2.2,2.2)
ax.grid(True)
update = lambda k: line.set_data(x,U[:,k*tstep])
ani = FuncAnimation(fig,update,frames=nframes,interval=1000*tf/nframes)
plt.close()
HTML(ani.to_html5_video())