Fitting Models to Data#
import numpy as np
import matplotlib.pyplot as plt
import scipy.linalg as la
Linear Regression#
Suppose we have \(n+1\) points
and we want to fit a line
that “best fits” the data. There are different ways to quantify what “best fit” means but the most common method is called least squares linear regression. In least squares linear regression, we want to minimize the sum of squared errors
In matrix notation
then the sum of squared errors can be expressed as
We solve for the coefficients \(\mathbf{c} = [c_0,c_1]^T\) which minimize \(\Vert \mathbf{y} - A \mathbf{c} \Vert^2\) in 2 two ways:
Normal Equations#
The coefficient vector \(\mathbf{c}\) is the unique solution of the system
QR Decomposition#
Let \(A = Q_1R_1\) be the (thin) QR decomposition of \(A\) (where \(R_1\) is square upper triangular). The coefficient vector \(\mathbf{c}\) is the unique solution of the system
Example: Fake Noisy Linear Data#
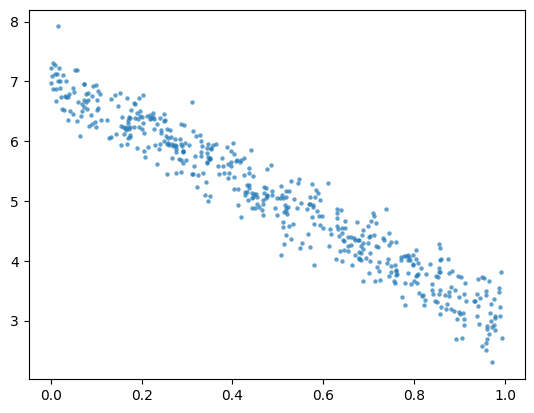
Let’s do an example with some fake data. Let’s build a set of random points based on the model
for some arbitrary choice of \(c_0\) and \(c_1\). The factor \(\epsilon\) represents some random noise which we model using the normal distribution. We can generate random numbers sampled from the standard normal distribution using the NumPy function numpy.random.randn.
The goal is to demonstrate that we can use linear regression to retrieve the coefficeints \(c_0\) and \(c_1\) from the linear regression calculation.
c0 = 7
c1 = -4
N = 500
t = np.random.rand(N)
noise = 0.3*np.random.randn(N)
y = c0 + c1*t + noise
plt.scatter(t,y,alpha=0.7,lw=0,s=10);
plt.show()
Let’s use linear regression to retrieve the coefficients \(c_0\) and \(c_1\). Construct the matrix \(A\):
A = np.column_stack([np.ones(N),t])
print(A.shape)
(500, 2)
Let’s look at the first 5 rows of \(A\) to see that it is in the correct form:
A[:5,:]
array([[1. , 0.64835034],
[1. , 0.19419242],
[1. , 0.78607232],
[1. , 0.51940935],
[1. , 0.72293165]])
Use scipy.linalg.solve to solve \(\left(A^T A\right)\mathbf{c} = \left(A^T\right)\mathbf{y}\) for \(\mathbf{c}\):
c = la.solve(A.T @ A, A.T @ y)
print(c)
[ 7.02789431 -4.03227316]
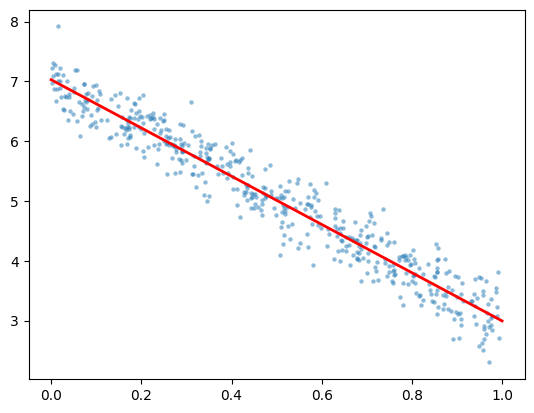
We have retrieved the coefficients of the model almost exactly! Let’s plot the random data points with the linear regression we just computed.
ts = np.linspace(0,1,10)
ys = c[0] + c[1]*ts
plt.plot(ts,ys,'r',linewidth=2)
plt.scatter(t,y,alpha=0.5,lw=0,s=10);
plt.show()
Polynomial Regression#
The same idea works for fitting a degree \(d\) polynomial model
to a set of \(n+1\) data points
We form the matrices as before but now the Vandermonde matrix \(A\) has \(d+1\) columns
The coefficients \(\mathbf{c} = [c_0,c_1,c_2,\dots,c_d]^T\) which minimize the sum of squared errors \(SSE\) is the unique solution of the linear system
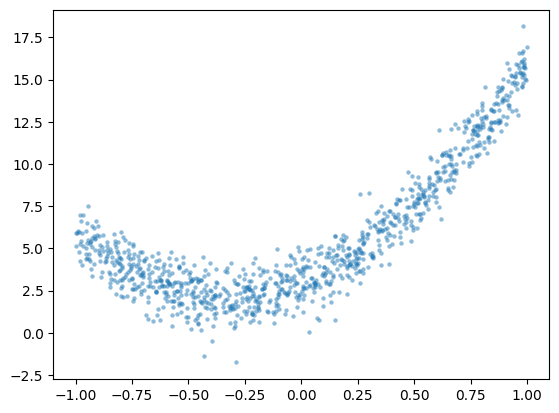
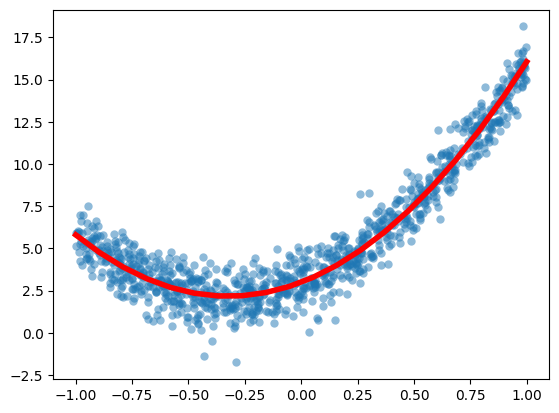
Example: Fake Noisy Quadratic Data#
Let’s build some fake data using a quadratic model \(y = c_0 + c_1x + c_2x^2 + \epsilon\) and use linear regression to retrieve the coefficients \(c_0\), \(c_1\) and \(c_2\).
c0 = 3
c1 = 5
c2 = 8
N = 1000
t = 2*np.random.rand(N) - 1 # Random numbers in the interval (-1,1)
noise = np.random.randn(N)
y = c0 + c1*t + c2*t**2 + noise
plt.scatter(t,y,alpha=0.5,lw=0,s=10);
plt.show()
Construct the matrix \(A\):
A = np.column_stack([np.ones(N),t,t**2])
Use scipy.linalg.solve to solve \(\left( A^T A \right) \mathbf{c} = \left( A^T \right) \mathbf{y}\):
c = la.solve(A.T @ A,A.T @ y)
Plot the result:
ts = np.linspace(-1,1,20)
ys = c[0] + c[1]*ts + c[2]*ts**2
plt.plot(ts,ys,'r',linewidth=4)
plt.scatter(t,y,alpha=0.5,lw=0)
plt.show()
Let’s solve again but this time we use the QR decomposition:
Q1,R1 = la.qr(A,mode='economic')
b = Q1.T @ y
c1 = la.solve(R1,b[:3])
Plot the result:
ts = np.linspace(-1,1,20)
ys = c1[0] + c1[1]*ts + c1[2]*ts**2
plt.plot(ts,ys,'r',linewidth=4)
plt.scatter(t,y,alpha=0.5,lw=0)
plt.show()