Systems of Equations#
import numpy as np
import scipy.integrate as spi
import scipy.linalg as la
import matplotlib.pyplot as plt
Classification#
A system of differential equations is a collection of equations involving unknown functions \(y_0(t),\dots,y_{d-1}(t)\) (with the same independent variable \(t\)) and their derivatives. The dimension of a system of differential equations is the number \(d\) of unknown functions \(y_0,\dots,y_{d-1}\) in the system. The order of a system of differential equations is the highest order derivative of any of the unknown functions appearing in the system. A system of differential equations is linear if each equation in the system is linear. A system of differential equations is autonomous if each equation in the system is autonomous.
For example, the system of differential equations
is a first order, 2-dimensional, autonomous, nonlinear system of differential equations, and the system
is a second order, 2-dimensional, nonautonomous, linear system of differential equations.
See also
Check out Notes on Diffy Qs: Section 3.1 for more information about systems of differential equations.
First Order Transformation#
A first order, \(d\)-dimensional system of differential equations is of the form
for some functions \(f_0,\dots,f_{d-1}\). Introduce vector notation
where
Any system of differential equations can be written as a first order system by introducing new variables. The procedure is as follows:
Identify the order of each unknown function in the system.
If \(y\) has order \(n\) then introduce \(n-1\) new variables for \(y\) and its derivatives: \(u_0 = y, u_1 = y',\dots,u_{n-1} = y^{(n-1)}\).
Rewrite the equations for \(u_0',\dots,u_{n-1}'\) in terms of the new variables only.
For example, consider a 1-dimensional, second order, linear equation with constant coefficients
There is only one unknown function \(y\) and it has order 2 therefore we introduce \(u_0 = y\) and \(u_1 = y'\) and write
Let’s try another example. Consider the following the system
Both \(x\) and \(y\) are second order therefore we introduce new variables \(u_0 = x, u_1 = x', u_2 = y, u_3 = y'\) and write
See also
Check out Notes on Diffy Qs: Section 3.1 for more examples of transforming higher order systems into first order systems.
Euler’s Method for Systems#
We have seen numerical methods for first order scalar equations. How do we apply these methods to systems? First, transform the system into a first order system and then apply the method to each equation in the system simultaneously.
For example, let’s apply Euler’s method to a 2-dimensional, first order system
Starting with initial values \(x_0 = x(t_0)\) and \(y_0 = y(t_0)\) we define the resursive sequences
where \(t_n = t_0 + nh\) for step size \(h\). Use vector notation to write
where
Let’s write a function to implement Euler’s method for systems:
def odeEulerSys(f,t,u0):
u = np.zeros([len(t),len(u0)])
u[0,:] = u0
for n in range(0,len(t)-1):
u[n+1,:] = u[n,:] + f(t[n],u[n,:])*(t[n+1] - t[n])
return u
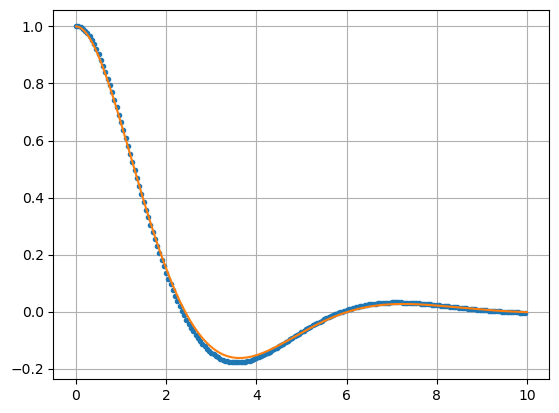
Use odeEulerSys to approximate the solution of the equation
and compare with the exact solution
a = 1; b = 1; c = 1; tf = 10;
f = lambda t,u: np.array([u[1],(-b*u[1]-c*u[0])/a])
t = np.arange(0,tf,0.05)
u0 = [1,0]
u = odeEulerSys(f,t,u0)
plt.plot(t,u[:,0],'.')
T = np.linspace(0,tf,tf*50)
Y = np.exp(-T/2)*(np.cos(np.sqrt(3)/2*T) + 1/np.sqrt(3)*np.sin(np.sqrt(3)/2*T))
plt.plot(T,Y), plt.grid(True)
plt.show()
See also
Check out Mathematical Python: Systems of Equations for more Python examples using Euler’s method.
Numerical Solutions with SciPy#
Euler’s method is simple to understand but it is not accurate enough to use in practice. Higher order Runge-Kutta methods are the standard methods used for real applications but we won’t get into how they work exactly. Instead, let’s just loosely describe a Runge-Kutta method as a “higher order Euler method” and let’s focus on how scipy.integrate.odeint works with systems of differential equations.
The procedure to compute a numerical approximation of a solution of a system of differential equations is:
Write the system as a first order system \(\mathbf{u}' = \mathbf{f}(\mathbf{u},t)\), \(\mathbf{u}_0 = \mathbf{u}(t_0)\).
Define a Python function
f(u,t)for the right hand side \(\mathbf{f}(\mathbf{u},t)\) where parameteruis a vector such thatu[k]corresponds to funciton \(u_k(t)\). Note that the variable \(\mathbf{u}\) is first and \(t\) is second.Define vector
tof \(t\) values wheret[0]is \(t_0\). Usuallyt = np.linspace(t0,tf,N+1)or equivalentlyt = np.arange(t0,tf+h,h)where \(h = (t_f - t_0)/N\).Define initial value vector
u0corresponding to \(\mathbf{u}_0 = \mathbf{u}(t_0)\) where \(t_0\) ist[0].Compute the solution
u = spi.odeint(f,u0,t). The output of the function is the matrixuof shape(len(t),len(u0))such that columnu[:,k]corresponds to the values of the function \(u_k(t)\) from \(t_0\) to \(t_f\), and rowu[n,:]corresponds to the vector \(\mathbf{u}(t_n) = (u_0(t_n),\dots,u_{d-1}(t_n))\) at time \(t_n\).
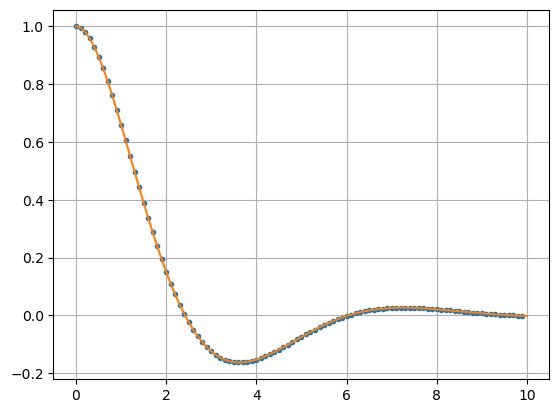
For example, let’s approximate the solution of the equation
and compare with the exact solution
a = 1; b = 1; c = 1; tf = 10;
f = lambda u,t: np.array([u[1],(-b*u[1]-c*u[0])/a])
t = np.arange(0,tf,0.1)
u0 = [1,0]
u = spi.odeint(f,u0,t)
plt.plot(t,u[:,0],'.')
T = np.linspace(0,tf,tf*50)
Y = np.exp(-T/2)*(np.cos(np.sqrt(3)/2*T) + 1/np.sqrt(3)*np.sin(np.sqrt(3)/2*T))
plt.plot(T,Y), plt.grid(True)
plt.show()
See also
Check out Mathematical Python: Systems of Equations for more Python examples, and SciPy documentation for more information about scipy.integrate.odeint.
Linear Stability Analysis#
Consider a first order, \(d\)-dimensional autonomous system of differential equations
A point \(\mathbf{c} \in \mathbb{R}^d\) is a critical point if \(\mathbf{f}(\mathbf{c}) = \mathbf{0}\). A critical point corresponds to an equilibrium solution (also called a steady state solution)
A critical point \(\mathbf{c}\) is an attractor if all solutions which start near \(\mathbf{c}\) converge to \(\mathbf{c}\) as \(t \to \infty\). A critical point \(\mathbf{c}\) is a repeller if all solutions which start near \(\mathbf{c}\) diverge from \(\mathbf{c}\) as \(t \to \infty\). A critical point \(\mathbf{c}\) is a unstable if some solutions which start near \(\mathbf{c}\) converge to \(\mathbf{c}\) and some diverge as \(t \to \infty\).
Let \(\mathbf{c}\) be a critical point and let \(\mathbf{J}_{\mathbf{c}}\) be the Jacobian of the system at \(\mathbf{c}\):
The linearization theorem allows us to classify critical points:
if \(\mathrm{Re}(\lambda) < 0\) for each eigenvalue \(\lambda\) of \(\mathbf{J}_{\mathbf{c}}\) then \(\mathbf{c}\) is a attractor
if \(\mathrm{Re}(\lambda) > 0\) for each eigenvalue \(\lambda\) of \(\mathbf{J}_{\mathbf{c}}\) then \(\mathbf{c}\) is a repeller
if some eigenvalues of \(\mathbf{J}_{\mathbf{c}}\) have positive real part and some have negative real part then \(\mathbf{c}\) is unstable
For example, let’s find and classify the critical points of the system
There are 2 critical points: \((1,1)\) and \((-1,-1)\). Compute partial derivatives
Compute eigenvalues of the Jacobians
J1 = np.array([[0.,-2.],[1.,-1.]])
evals1,evecs1 = la.eig(J1)
print(evals1)
[-0.5+1.32287566j -0.5-1.32287566j]
J2 = np.array([[0.,2.],[1.,-1.]])
evals2,evecs2 = la.eig(J2)
print(evals2)
[ 1.+0.j -2.+0.j]
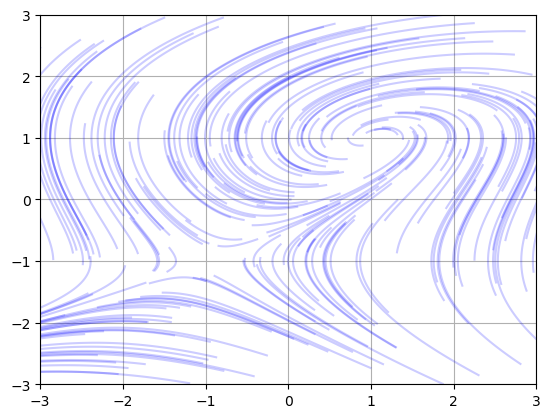
Therefore \((1,1)\) is an attractor and \((-1,-1)\) is unstable. Let’s plot solutions:
f = lambda u,t: np.array([1 - u[1]**2,u[0] - u[1]])
t = np.linspace(0,1,100)
for _ in range(200):
u0 = 6*np.random.rand(2) - 3
u = spi.odeint(f,u0,t)
plt.plot(u[:,0],u[:,1],c='b',alpha=0.2)
plt.axis([-3,3,-3,3]), plt.grid(True)
plt.show()
See also
Check out Notes on Diffy Qs: Section 8.1 and Section 8.2 for more information and examples about linear classification of critical points.