2D Mass Spring System#
import numpy as np
import scipy.integrate as spi
import matplotlib.pyplot as plt
Problem Statement#
A flat object slides over a flat surface. The object is attached to one end of a spring and the spring is fixed at the other end. Construct a mathematical model of the motion of the object.
Variables and Parameters#
Description |
Symbol |
Dimensions |
Type |
|---|---|---|---|
position of object in \(x\)-direction |
\(x\) |
L |
dependent variable |
position of object \(y\)-direction |
\(y\) |
L |
dependent variable |
time |
\(t\) |
T |
independent variable |
mass of the object |
\(m\) |
M |
parameter |
spring constant |
\(k\) |
MT-2 |
parameter |
equilibrium length of the spring |
\(L\) |
L |
parameter |
Assumptions and Constraints#
no friction, drag or damping
one end of the spring is fixed at the origin \((0,0)\) and the other end is attached to the mass a position \((x(t),y(t))\)
the mass of the spring is negligible
Construction#
The stretch/compression in the spring is the difference of the equilibrium length and the distance of the mass from origin. In other words, the stretch/compression in the spring is given by
where \(\| \mathbf{x}(t) \| = \sqrt{ x(t)^2 + y(t)^2 }\). The spring force acts in the direction from the mass to the origin. The corresponding unit vector is
Therefore the spring force is given by
Apply Newton’s second law of motion:
Apply the nondimensionalization procedure. Let \(x = [x]x^*\), \(y = [y]y^*\) and \(t = [t]t^*\). We should choose \([x] = [y]\) since there is no reason to treat the two directions differently and so let \([c] = [x] = [y]\). Make the substitutions:
Divide by the highest order coefficient \(m[c]/[t]^2\) to find:
Choose scaling factors
and find
Introduce new variables
and write the system as a first order system of equation
def f(u,t):
dudt = np.array([0.,0.,0.,0.])
D = np.sqrt(u[0]**2 + u[2]**2)
dudt[0] = u[1]
dudt[1] = u[0]/D - u[0]
dudt[2] = u[3]
dudt[3] = u[2]/D - u[2]
return dudt
u0 = [1.,0.,0.,1.]
t = np.linspace(0,100,1000)
U = spi.odeint(f,u0,t)
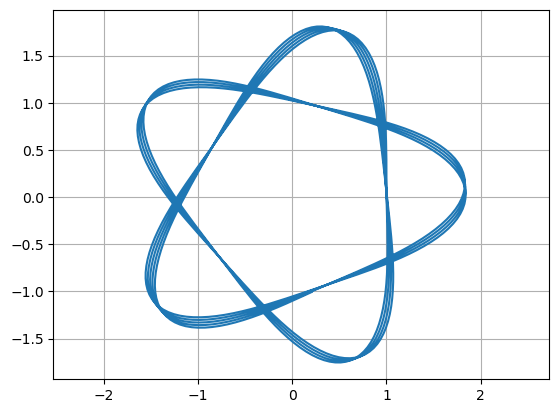
plt.plot(U[:,0],U[:,2])
plt.grid(True), plt.axis('equal')
plt.show()
Analysis#
Under construction