Simple Pendulum#
import numpy as np
import matplotlib.pyplot as plt
import scipy.integrate as spi
Problem Statement#
A pendulum is a mass attached to one end of a rod which is fixed at the other end and swings about the fixed end under the force of gravity. How does the pendulum swing over time based on initial position and velocity?
Variables and Parameters#
Description |
Symbol |
Dimensions |
Type |
|---|---|---|---|
angle of the pendulum |
\(\theta\) |
1 |
dependent variable |
time |
\(t\) |
T |
independent variable |
length of rod |
\(L\) |
L |
parameter |
mass of the object |
\(m\) |
M |
parameter |
constant of gravity |
\(g\) |
LT-2 |
parameter |
initial angular position |
\(\theta_0\) |
1 |
parameter |
initial angular velocity |
\(\omega_0\) |
T-1 |
parameter |
Constraints and Assumptions#
no drag, damping or friction
mass is a point
rod has no mass and no drag
Construction#
The position of the mass is given by the angle \(\theta\):
Let \(F\) be the magnitude of the force in the rod acting on the mass. Since \(F\) acts in the direction of the rod from the mass to the origin we have
Apply Newton’s second law
We don’t have an expression for \(F\) and so we want to combine the equations above to eliminate the variable \(F\). Since \(x = L \sin \theta \) and \(y = - L \cos \theta\) and \(L\) is constant we have
therefore we can rewrite the system of equations in terms of \(\theta\):
Multiply the first equation by \(\cos \theta\) and the second equation by \(\sin \theta\) and add to get
and finally
Apply the nondimensionalization procedure. Let \(\theta = [\theta] \theta^*\) and \(t = [t] t^*\) and write
Divide by the second order term and simplify
There are several choices and we choose \([\theta] = 1\) and \([t] = \sqrt{\frac{L}{g}}\) and we arrive at the equation
Introduce new variables \(u_0 = \theta\) and \(u_1 = \frac{d\theta}{dt^*}\) and write
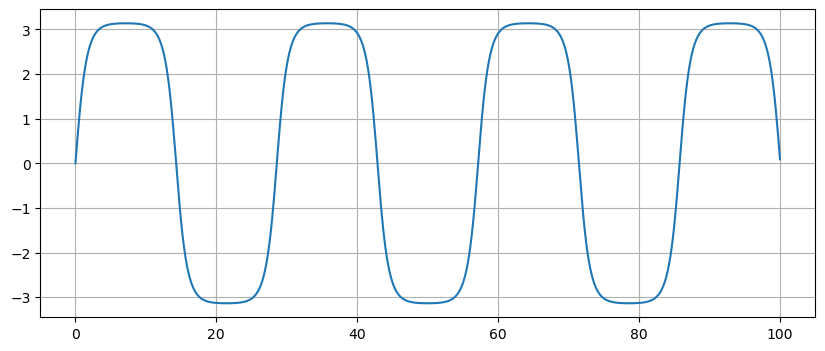
Plot solutions for different initial conditions:
f = lambda u,t: np.array([u[1],-np.sin(u[0])])
u0 = [0.,1.99999]
t = np.linspace(0,100,1000)
u = spi.odeint(f,u0,t)
plt.figure(figsize=(10,4))
plt.plot(t,u[:,0]), plt.grid(True)
plt.show()
Analysis#
Under construction